Schweißroboter
Aufgabe
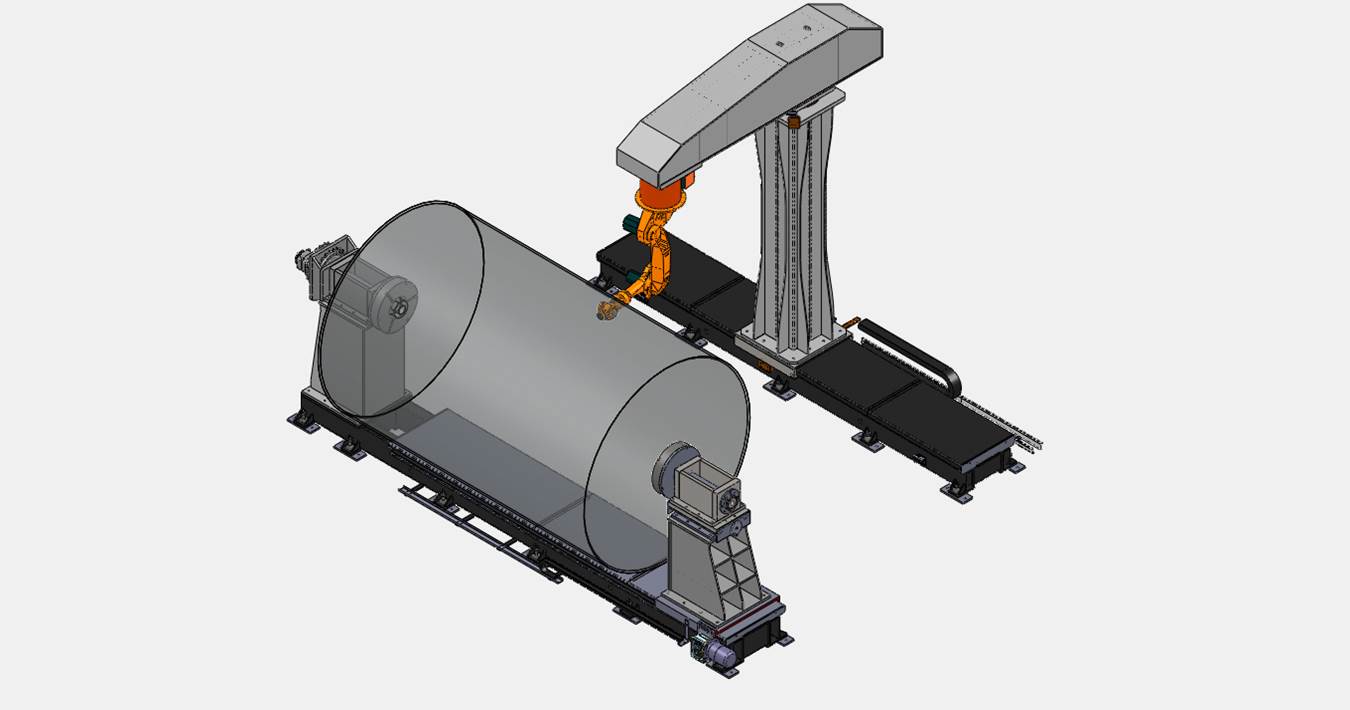
Ein Hersteller von Schweißsystemen wollte eine Schweißanlage realisieren, mit der es möglich sein sollte Metallrohre mit einem Durchmesser von bis zur 2500mm und einer Gesamtlänge bis 4000mm zu bearbeiten. Das besondere an dieser Anlage sollte ihre hohe Flexibilität und Präzision beim Schweißen sein, um die Werkstücke in jeder denkbaren Position und Genauigkeit zu bearbeiten.
Lösung
Um die Flexibilität der Anlage zu gewährleisten, wurde ein Schweißroboter an einem Schwenkarm montiert, der sich um 360° drehen lässt. Gleichzeitg war es möglich die gesamte Anlage über einen Verfahrweg von 5500mm zu bewegen um so gleichmäßige horizontale Schweißnähte zu erstellen. Für den Antrieb des Schwenkarms wurde ein ATLANTA B-Servo Schneckengetriebe mit einer Modul 5 Ritzelwelle und einem Schmiersystem verwendet. Den Antrieb der Fahrachse übernahm ein Zahnstangentrieb bestehend aus BR Zahnstangen Q10, ein B-Servo Schneckengetriebe inkl. Ritzelwelle und einem Schmiersystem.
Gelieferte Komponente
Antrieb Schwenkarm:
- 59 06 052 B-Servo Schneckengetriebe a=100, i=52
- 20 28 613 Ritzelwelle m=5, Z=13 geradeverzahnt
- 65 05 024 Motorkupplung
- 65 91 518 Filzritzel m=5, Z=18
- 65 91 510 Befestigungsachse für m=5 Filzritzel
Antrieb Fahrachse
- 34 30 101 Zahnstangen Q10, m=3, gehärtet
- 59 05 052 B-Servo Schneckengetriebe a=80, i=52
- 20 28 521 Ritzelwelle m=3, Z=21 geradeverzahnt
- 65 53 024 Motorkupplung
- 65 91 328 Filzritzel m=3, Z=19
- 65 91 310 Befestigungsachse für m=3 Filzritzel